
Equipos del grupo RoboTec, del Tec Guadalajara, tuvieron resultados destacados en el Torneo Mexicano de Robótica; 2 aseguraron pase al mundial
3 equipos distintos del grupo RoboTec, del Tec Guadalajara, obtuvieron resultados sobresalientes en el Torneo Mexicano de Robótica (TMR) y 2 de ellos aseguraron su lugar en el mundial que será en Salvador Bahía, Brasil, en julio 2025.
Estos fueron los logros obtenidos:
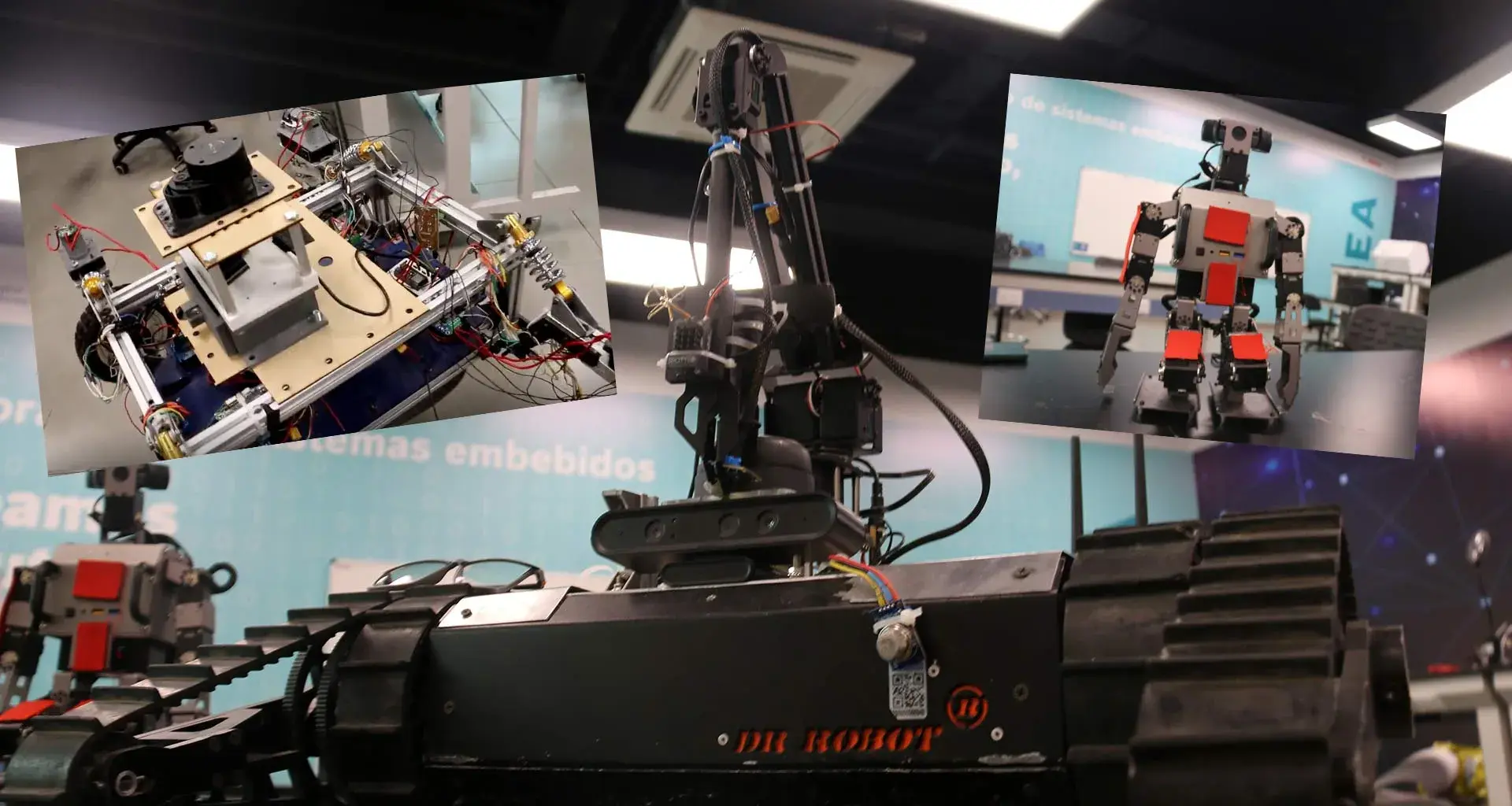
- Un equipo obtuvo el primer lugar en la categoría de Rescate Mayor (segundo año consecutivo en primer lugar en esa categoría)
- Otro, el segundo lugar en la categoría de robots humanoides Kid Size; lograron su segunda clasificación consecutiva al certamen global
- Y un tercer equipo, también parte de RoboTec y cuyos integrantes son de PrepaTec Guadalajara, se colocó en el tercer sitio de la categoría Lunar Rover (primera vez que se implementa esta modalidad).
RoboTec es el grupo estudiantil de robótica del Tec Guadalajara. El resultado en Rescate Mayor y en humanoides Kid Size les permitió a cada uno de esos 2 equipos ganar un lugar para el Mundial de RoboCop 2025.
Dicho certamen es el encuentro de robótica más importante del mundo, en el que participan 2000 personas de universidades top a nivel global.
Gracias a su desempeño, ambos escuadras representarán a México en Brasil en dichas categorías. RoboTec participó en el TMR con 5 equipos en total (36 personas). De éstos, 3 fueron los que obtuvieron los podios mencionados.

Desempeño eficaz
El TMR es la eliminatoria nacional para ir el mundial, organizado por la Federación Mexicana de Robótica. Reúne hasta 1000 participantes de diferentes niveles educativos: desde primaria hasta posgrados. Se realiza una vez al año y en 2025 fue en la Ciudad de México.
En robots humanoides Kid Size la idea es que los robots puedan jugar fútbol de manera autónoma. Llegan incluso a enfrentamientos de penalties 1 a 1.
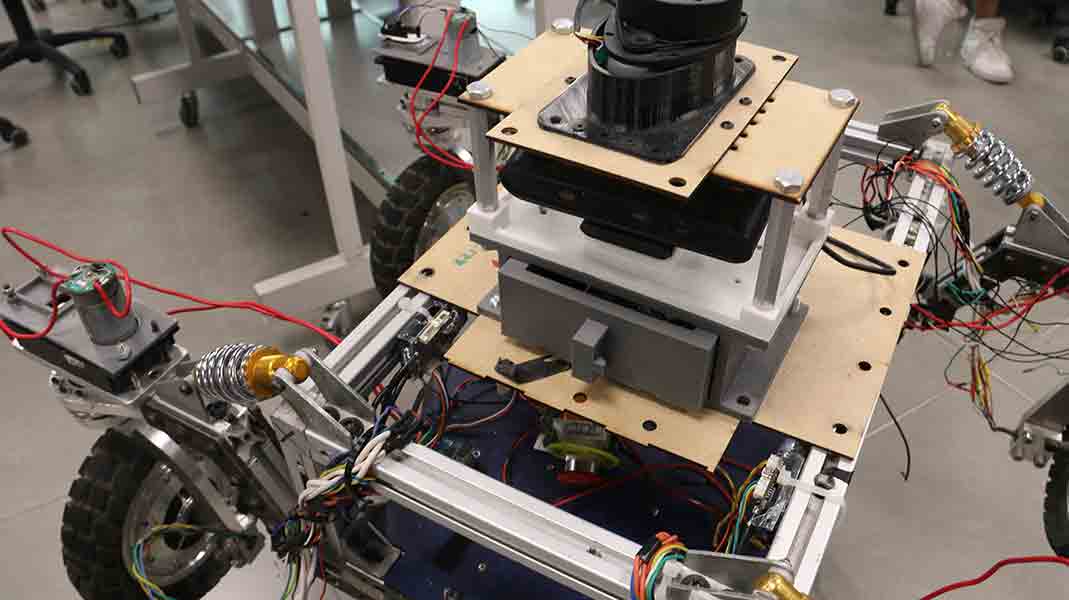
En robot de rescate mayor la meta es crear uno que trabaje en situaciones de peligro y con situaciones simuladas donde gracias a sensores sortean obstáculos, se mueven por terrenos de difícil acceso, identifican personas e integran diferentes tecnologías para resolver la problemática.
Óscar Carbajal, profesor de IMT del Tec Guadalajara y coordinador de RoboTec, explicó que “son 7 meses de antelación para mandar los documentos probatorios necesarios de cada robot para ser considerados para participar en el mundial”.
“Hay que destacar el trabajo en equipo de los estudiantes. A pesar de que son equipos diferentes, es el mismo grupo. No solamente trabajaban en su robot, sino que también apoyan a otros equipos, de otra categoría. Así se comparte el conocimiento”, subrayó el académico.
Robot Humanoide Kid Size
Ricardo Berumen, de Ingeniería en Mecatrónica (IMT), octavo semestre, opinó que “es un reto principalmente de software, de programación. Fue el tercer año que participó el equipo”.
“Nos centramos en la detección de pelotas y optimizar la caminata, sobre todo porque los recursos computacionales que tiene dentro del robot son limitados”, dijo.
Agregó que se enfocaron en soluciones alternativas, como “detectar la pelota de forma rápida, reducir la cantidad de frames (imágenes fijas) usadas por la cámara, que el robot pueda centrar y no tenga que ver constantemente la pelota, sino calcular la distancia o el bote para hacer una caminata directa”.
“Fue en tiempo récord entender cómo funcionaba la lógica del robot, cómo crear rutinas para que juegue fútbol”.- Iván Delgado.
Para Iván Delgado, de IMT, 4to. semestre, el mayor reto “fue en tiempo récord entender cómo funcionaba la lógica del robot, cómo crear rutinas para que juegue fútbol, funcione como portero o realice una patada”.
Sobre obtener el lugar para Brasil opinó que “es una alegría muy grande por tener un reconocimiento internacional como la mayoría de equipos de universidades prestigiosas y tener la oportunidad de participar con ellos; buscaremos tener buen lugar”.
Víctor Manuel, de IMT, 6to. semestre, aseguró que “el robot es pequeño y no puede patear tan fuerte. Esto representó un problema para los penales”.
“Teníamos una patada que estaba a medias; debíamos arreglar parámetros, velocidades del motor, ángulos, para que fuera capaz de llegar a la línea”, describió.

Rescate mayor: para situaciones de peligro
Saúl Ávila, de sexto semestre de IMT, explicó: “tenemos varios años desarrollando este proyecto… Fue realizar la instrumentación completa, la integración de toda la electrónica, la potencia y la parte digital”.
“Es un robot que tiene que estar en situaciones de desastre. Nos tocó integrar también sensores que pudieran ayudar al operador a saber el entorno real en el que se encuentra”, precisó.
“Integramos con sensores de gas, porque sabemos que en una catástrofe, por ejemplo, un terremoto, puede existir alguna fuga en un edificio o aspectos que ponen en peligro a rescatistas”, relató.
Por su parte, Itxchel Orozco, de 4to. semestre de IMT, mencionó que “el desempeño del robot fue muy bueno. Hablando de la mecánica, las pistas sí son agresivas. Y a pesar de que tuvo ciertos problemas el equipo supo resolverlos rápido”.
“También nos ayudó a detectar qué puntos débiles puede tener para tomarlos en cuenta y reforzar esos aspectos para la competencia mundial”, aclaró.
“Ayudó a detectar qué puntos débiles puede tener para tomarlos en cuenta y reforzar esos aspectos para la competencia mundial”.- Itxchel Orozco.
“Me sentí muy emocionado porque es una competencia en la que va mucha gente que también tienen robots muy competentes”, comentó Sebastián Rivera, de 4to. semestre de IMT.
Y refirió que en campus obtienen las herramientas “para saber reaccionar rápido con todo lo que necesitas para resolver y seguir en la competencia”.
A su vez, Grecia Pulido, de cuarto semestre de IMT, comentó: “me divertí muchísimo y aprendí bastante. Por suerte me tocó trabajar con personas muy resilientes”.
“Un consejo es que se permitan experimentar este tipo de situaciones y trabajar con personas que les apasione el tema en el que se interesan, que todo pase y siempre actuar rápido y con eficiencia”.

Nueva modalidad: Lunar Rover
Daniel Robledo, coach del equipo que participó en Lunar Rover, comentó que estudiantes integrantes aprendieron a convivir y trabajar realmente en equipo.
“Han hecho un análisis previo de si es lo correcto o no, antes de ir por el taladro, las brocas y todo para cortar un material”, precisó.
Compartió además que le permitió profundizar en “el aprendizaje de gestionar un proyecto bajo presión”. Y detalló que esta categoría consiste “en un terreno irregular, superficies de arena, y simula un espacio lunar”.
A la par, abundó que “el robot, de manera autónoma, debe dirigirse a hacia una piedra, recolectarla y llevar la muestra a un punto de entrega. Tiene que hacer un recorrido y reconocimiento de todo el terreno”.
“Somos un equipo a vencer. Esto es gracias al trabajo, pero también por el acompañamiento de profesores".- Óscar Carbajal.
Equipo a vencer
“Somos un equipo a vencer. Esto es gracias al trabajo, pero también por el acompañamiento de profesores y el apoyo que nos brinda el departamento de mecatrónica o la Escuela de Ingeniería del Tec para tener recursos, usar laboratorios y las facilidades para desarrollar esas actividades”, concluyó Carbajal.
La Federación Mexicana de Robótica es una asociación civil sin fines de lucro conformada por académicos de diferentes instituciones del país.
LEE TAMBIÉN:
LEE TAMBIÉN:
Notas Relacionadas
Seleccionar notas relacionadas automáticamente
0
Categoría:
Notas Relacionadas


